




























































Force-Sensing Mobile Microgrippers for Gentle Bioassembly of Spheroids
Spheroids can be useful to model complex human tissues because they can re-create specific cell-to-cell and cell-to-matrix interactions. But spheroids are fragile, and common techniques for moving them manually—via suction—can easily damage them. In tissue engineering, the tiniest bit of improper force can harm a living culture. Now, a force-sensing miniature robot—a mobile microgripper (MMG)—has been developed that can handle spheroids with care.
“Other techniques for cell spheroid bioassembly can affect the tissue construct and/or apply limited manipulation forces,” said David Cappelleri, PhD, professor of mechanical engineering and assistant vice president for Research Innovation School of Mechanical Engineering at Purdue University. “The force-sensing MMG presented here addresses these current issues by allowing the safe bioassembly of different spheroids into a single construct.”
This work is published in APL Bioengineering, in a paper entitled, “Force-sensing mobile microrobotic grippers for gentle and precise bioassembly of cell spheroids.”
Integrating different types of spheroids into one culture is key for tissue engineering. But individual spheroids have to be grown in place and then moved around, introducing the chance of damage to the spheroid.
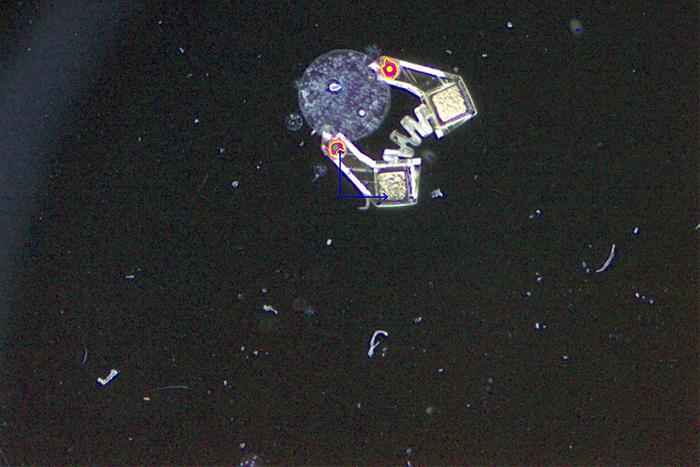
The MMG is a microscopic robot made of two arms connected by a hinge for a controlled—and gentle—gripping. Also, it is controlled by magnets, which are biocompatible with spheroids, decreasing the risk of collateral damage.
“This was a big part of the design—figuring out a way to use magnetic fields for both locomotion and for controlling the opening and closing of the gripper jaws,” Cappelleri said.
The gripping force is monitored and adjusted in real time, allowing researchers to adapt to the delicate nature of the cells. After simulating the efficacy of the MMG, in vitro testing showed that the device was able to successfully move and organize spheroids into neat patterns.
The researchers also verified that the range of gripping forces exerted by the MMG was compatible with the movement and subsequent survival of the spheroids.
Currently, the robot can successfully assemble the spheroids in a cellular “sheet,” but in the future, the researchers want to use their tiny robots to create full engineered tissues. In addition, the researchers want to take their microgrippers a step further, transitioning from manual control to automated spheroid assembly.
The post Force-Sensing Mobile Microgrippers for Gentle Bioassembly of Spheroids appeared first on GEN - Genetic Engineering and Biotechnology News.
Apa Reaksi Anda?
 Suka
0
Suka
0
 Kurang Suka
0
Kurang Suka
0
 Setuju
0
Setuju
0
 Tidak Setuju
0
Tidak Setuju
0
 Bagus
0
Bagus
0
 Berguna
0
Berguna
0
 Hebat
0
Hebat
0